这是 HashMap 中比较核心的几个成员变量;看看分别是什么意思?
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 static final int DEFAULT_INITIAL_CAPACITY = 1 << 4 ; static final int MAXIMUM_CAPACITY = 1 << 30 ; static final float DEFAULT_LOAD_FACTOR = 0.75f ; static final Entry<?,?>[] EMPTY_TABLE = {}; transient Entry<K,V>[] table = (Entry<K,V>[]) EMPTY_TABLE; transient int size; int threshold; final float loadFactor;
桶数组给定的默认容量为 16,负载因子为 0.75。Map 在使用过程中不断的往里面存放数据,当数量达到了 16 * 0.75 = 12 就需要将当前 16 的容量进行扩容,而扩容这个过程涉及到 rehash、复制数据等操作,所以非常消耗性能。
因此通常建议能提前预估 HashMap 的大小最好,尽量的减少扩容带来的性能损耗。
根据代码可以看到其实真正存放数据的是 table 数组:
1 transient Entry<K,V>[] table = (Entry<K,V>[]) EMPTY_TABLE;
这个数组,那么它又是如何定义的呢?
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 static class Entry <K ,V > implements Map .Entry <K ,V > final K key; V value; Entry<K,V> next; int hash; Entry(int h, K k, V v, Entry<K,V> n) { value = v; next = n; key = k; hash = h; }
Entry 是 HashMap 中的一个内部类,从他的成员变量很容易看出:
key 就是写入时的键。value 自然就是值。开始的时候就提到 HashMap 是由数组和链表组成,所以这个 next 就是用于实现链表结构。
hash 存放的是当前key 的 hashcode。
知晓了基本结构,那来看看其中重要的写入、获取函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 public V put (K key, V value) if (table == EMPTY_TABLE) { inflateTable(threshold); } if (key == null ) return putForNullKey(value); int hash = hash(key); int i = indexFor(hash, table.length); for (Entry<K,V> e = table[i]; e != null ; e = e.next) { Object k; if (e.hash == hash && ((k = e.key) == key || key.equals(k))) { V oldValue = e.value; e.value = value; e.recordAccess(this ); return oldValue; } } modCount++; addEntry(hash, key, value, i); return null ; }
判断当前数组是否需要初始化。
如果 key 为空,则 put 一个空值进去。
根据 key 计算出 hashcode。
根据计算出的 hashcode 定位出所在桶。
如果桶是一个链表则需要遍历判断里面的 hashcode、key 是否和传入 key 相等,如果相等则进行覆盖,并返回原来的值。
如果桶是空的,说明当前位置没有数据存入;新增一个 Entry 对象写入当前位置。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 void addEntry (int hash, K key, V value, int bucketIndex) if ((size >= threshold) && (null != table[bucketIndex])) { resize(2 * table.length); hash = (null != key) ? hash(key) : 0 ; bucketIndex = indexFor(hash, table.length); } createEntry(hash, key, value, bucketIndex); } void createEntry (int hash, K key, V value, int bucketIndex) Entry<K,V> e = table[bucketIndex]; table[bucketIndex] = new Entry<>(hash, key, value, e); size++; }
当调用 addEntry 写入 Entry 时需要判断是否需要扩容。
如果需要就进行两倍扩充,并将当前的 key 重新 hash 并定位。
而在 createEntry 中会将当前位置的桶传入到新建的桶中,如果当前桶有值就会在位置形成链表。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 public V get (Object key) if (key == null ) return getForNullKey(); Entry<K,V> entry = getEntry(key); return null == entry ? null : entry.getValue(); } final Entry<K,V> getEntry (Object key) if (size == 0 ) { return null ; } int hash = (key == null ) ? 0 : hash(key); for (Entry<K,V> e = table[indexFor(hash, table.length)]; e != null ; e = e.next) { Object k; if (e.hash == hash && ((k = e.key) == key || (key != null && key.equals(k)))) return e; } return null ; }
首先也是根据 key计算出 hashcode,然后定位到具体的桶中。
判断该位置是否为链表。
不是链表就根据 key、key 的 hashcode 是否相等来返回值。
为链表则需要遍历直到 key 及 hashcode 相等时候就返回值。
啥都没取到就直接返回 null 。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 void resize (int newCapacity) Entry[] oldTable = table; int oldCapacity = oldTable.length; if (oldCapacity == MAXIMUM_CAPACITY) { threshold = Integer.MAX_VALUE; return ; } Entry[] newTable = new Entry[newCapacity]; transfer(newTable, initHashSeedAsNeeded(newCapacity)); table = newTable; threshold = (int )Math.min(newCapacity * loadFactor, MAXIMUM_CAPACITY + 1 ); } void transfer (Entry[] newTable, boolean rehash) int newCapacity = newTable.length; for (Entry<K,V> e : table) { while (null != e) { Entry<K,V> next = e.next; if (rehash) { e.hash = null == e.key ? 0 : hash(e.key); } int i = indexFor(e.hash, newCapacity); e.next = newTable[i]; newTable[i] = e; e = next; } } }
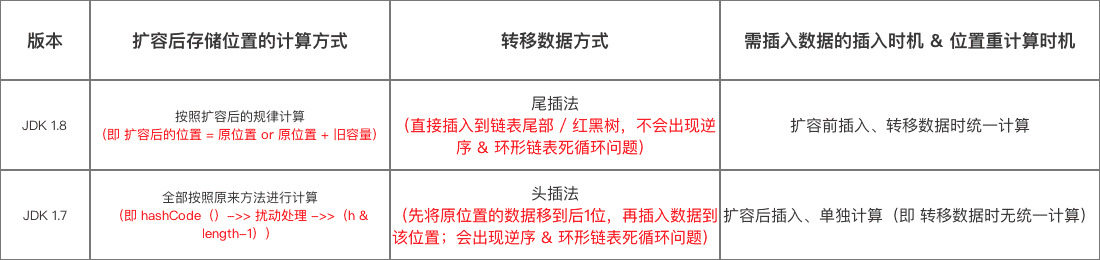
这里很容易就想到多线程情况下,隐约感觉这个transfer方法在多线程环境下会乱套。事实上也是这样的,由于缺乏同步机制,当多个线程同时resize的时候,某个线程t所持有的引用next(参考上面代码next指向原桶数组中某个桶外挂单链表的下一个需要转移的Entry),可能已经被转移到了新桶数组中,那么最后该线程t实际上在对新的桶数组进行transfer操作。
如果有更多的线程出现这种情况,那很可能出现大量线程都在对新桶数组进行transfer,那么就会出现多个线程对同一链表无限进行链表反转的操作,极易造成死循环,数据丢失等等,因此HashMap不是线程安全的,考虑在多线程环境下使用并发工具包下的ConcurrentHashMap。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 transient int hashSeed = 0 ;final boolean initHashSeedAsNeeded (int capacity) boolean currentAltHashing = hashSeed != 0 ; boolean useAltHashing = sun.misc.VM.isBooted() && (capacity >= Holder.ALTERNATIVE_HASHING_THRESHOLD); boolean switching = currentAltHashing ^ useAltHashing; if (switching) { hashSeed = useAltHashing ? sun.misc.Hashing.randomHashSeed(this ) : 0 ; } return switching; }
从hashSeed变量的注释可以看出,哈希种子一个随机值,在计算key的哈希码时会用到这个种子,目的是为了进一步减少哈希碰撞。如果hashSeed=0表示禁用备用哈希。
而Holder中维护的ALTERNATIVE_HASHING_THRESHOLD是触发启用备用哈希的阈值,该值表示,如果容器的容量 (注意是容量,不是实际大小)达到了该值,容器应该启用备用哈希。
Holder会尝试读取JVM启动时传入的参数-Djdk.map.althashing.threshold并赋值给ALTERNATIVE_HASHING_THRESHOLD。它的值有如下含义:
ALTERNATIVE_HASHING_THRESHOLD = 1,总是使用备用哈希
ALTERNATIVE_HASHING_THRESHOLD = -1,禁用备用哈希
在initHashSeedAsNeeded(int capacity)方法中,会判断如果容器的容量>=ALTERNATIVE_HASHING_THRESHOLD,就会生成一个随机的哈希种子hashSeed,该种子会在put方法调用过程中的hash方法中使用到:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 final int hash (Object k) int h = hashSeed; if (0 != h && k instanceof String) { return sun.misc.Hashing.stringHash32((String) k); } h ^= k.hashCode(); h ^= (h >>> 20 ) ^ (h >>> 12 ); return h ^ (h >>> 7 ) ^ (h >>> 4 ); } static int indexFor (int h, int length) return h & (length-1 ); }
解决的问题 :不同的键的的hashcode仅仅只能通过低位 来区分。高位的信息 没有被充分利用。
HashMap它使用一个supplemental hash function对键的hashCode再进行了一个supplemental hash ,将最终的hash值作为键的hash值来进行桶的位置映射。这个过程叫做再哈希(rehash) 。
经过一个supplemental hash过程后,能保证海明距离为常数的不同的hashcode有一个哈希冲突次数上界(装载因子为0.75的时候,大约是8次)。
当 Hash 冲突严重时,在桶上形成的链表会变的越来越长,这样在查询时的效率就会越来越低;时间复杂度为 O(N)。
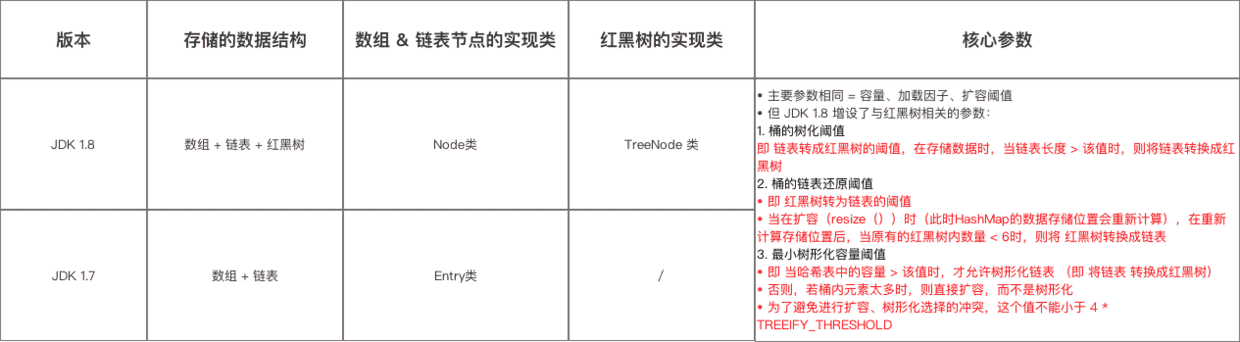
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 static final int DEFAULT_INITIAL_CAPACITY = 1 << 4 ; static final int MAXIMUM_CAPACITY = 1 << 30 ;static final float DEFAULT_LOAD_FACTOR = 0.75f ;static final int TREEIFY_THRESHOLD = 8 ; static final int UNTREEIFY_THRESHOLD = 6 ;transient Node<K,V>[] table;transient Set<Map.Entry<K,V>> entrySet;transient int size;
和 1.7 大体上都差不多,还是有几个重要的区别:
TREEIFY_THRESHOLD 用于判断是否需要将链表转换为红黑树的阈值。UNTREEIFY_THRESHOLD用于判断是否需要将红黑树转换为链表的阈值。HashEntry 修改为 Node。
Node 的核心组成其实也是和 1.7 中的 HashEntry 一样,存放的都是 key value hashcode next 等数据。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 final V putVal (int hash, K key, V value, boolean onlyIfAbsent, boolean evict) Node<K,V>[] tab; Node<K,V> p; int n, i; if ((tab = table) == null || (n = tab.length) == 0 ) n = (tab = resize()).length; if ((p = tab[i = (n - 1 ) & hash]) == null ) tab[i] = newNode(hash, key, value, null ); else { Node<K,V> e; K k; if (p.hash == hash && ((k = p.key) == key || (key != null && key.equals(k)))) e = p; else if (p instanceof TreeNode) e = ((TreeNode<K,V>)p).putTreeVal(this , tab, hash, key, value); else { for (int binCount = 0 ; ; ++binCount) { if ((e = p.next) == null ) { p.next = newNode(hash, key, value, null ); if (binCount >= TREEIFY_THRESHOLD - 1 ) treeifyBin(tab, hash); break ; } if (e.hash == hash && ((k = e.key) == key || (key != null && key.equals(k)))) break ; p = e; } } if (e != null ) { V oldValue = e.value; if (!onlyIfAbsent || oldValue == null ) e.value = value; afterNodeAccess(e); return oldValue; } } ++modCount; if (++size > threshold) resize(); afterNodeInsertion(evict); return null ; }
看似要比 1.7 的复杂,我们一步步拆解:
判断当前桶是否为空,空的就需要初始化(resize 中会判断是否进行初始化)。
根据当前 key 的 hashcode 定位到具体的桶中并判断是否为空,为空表明没有 Hash 冲突就直接在当前位置创建一个新桶即可。
如果当前桶有值( Hash 冲突),那么就要比较当前桶中的 key、key 的hashcode 与写入的 key 是否相等,相等就赋值给 e,在第 8 步的时候会统一进行赋值及返回。
如果当前桶为红黑树,那就要按照红黑树的方式写入数据。
如果是个链表,就需要将当前的 key-value 封装成一个新节点写入到当前桶的后面(形成链表)。
接着判断当前链表的大小是否大于预设的阈值,大于时就要转换为红黑树。
如果在遍历过程中找到 key 相同时直接退出遍历。
如果 e != null 就相当于存在相同的 key,那就需要将值覆盖。
最后判断是否需要进行扩容。
链表转为红黑树的前提是整个数组的大小达到了64,如果没有达到,会先扩容。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 public V get (Object key) Node<K,V> e; return (e = getNode(hash(key), key)) == null ? null : e.value; } final Node<K,V> getNode (int hash, Object key) Node<K,V>[] tab; Node<K,V> first, e; int n; K k; if ((tab = table) != null && (n = tab.length) > 0 && (first = tab[(n - 1 ) & hash]) != null ) { if (first.hash == hash && ((k = first.key) == key || (key != null && key.equals(k)))) return first; if ((e = first.next) != null ) { if (first instanceof TreeNode) return ((TreeNode<K,V>)first).getTreeNode(hash, key); do { if (e.hash == hash && ((k = e.key) == key || (key != null && key.equals(k)))) return e; } while ((e = e.next) != null ); } } return null ; }
get 方法看起来就要简单许多了。
首先将 key hash 之后取得所定位的桶。
如果桶为空则直接返回 null。
否则判断桶的第一个位置(有可能是链表、红黑树)的key 是否为查询的 key,是就直接返回 value。
如果第一个不匹配,则判断它的下一个是红黑树还是链表。
红黑树就按照树的查找方式返回值。
不然就按照链表的方式遍历匹配返回值。
从这两个核心方法(get/put)可以看出 1.8 中对大链表做了优化,修改为红黑树之后查询效率直接提高到了 O(logn)。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 final Node<K,V>[] resize() { Node<K,V>[] oldTab = table; int oldCap = (oldTab == null ) ? 0 : oldTab.length; int oldThr = threshold; int newCap, newThr = 0 ; if (oldCap > 0 ) { if (oldCap >= MAXIMUM_CAPACITY) { threshold = Integer.MAX_VALUE; return oldTab; } else if ((newCap = oldCap << 1 ) < MAXIMUM_CAPACITY && oldCap >= DEFAULT_INITIAL_CAPACITY) newThr = oldThr << 1 ; } else if (oldThr > 0 ) newCap = oldThr; else { newCap = DEFAULT_INITIAL_CAPACITY; newThr = (int )(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY); } if (newThr == 0 ) { float ft = (float )newCap * loadFactor; newThr = (newCap < MAXIMUM_CAPACITY && ft < (float )MAXIMUM_CAPACITY ? (int )ft : Integer.MAX_VALUE); } threshold = newThr; @SuppressWarnings({"rawtypes","unchecked"}) Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap]; table = newTab; if (oldTab != null ) { for (int j = 0 ; j < oldCap; ++j) { Node<K,V> e; if ((e = oldTab[j]) != null ) { oldTab[j] = null ; if (e.next == null ) newTab[e.hash & (newCap - 1 )] = e; else if (e instanceof TreeNode) ((TreeNode<K,V>)e).split(this , newTab, j, oldCap); else { Node<K,V> loHead = null , loTail = null ; Node<K,V> hiHead = null , hiTail = null ; Node<K,V> next; do { next = e.next; if ((e.hash & oldCap) == 0 ) { if (loTail == null ) loHead = e; else loTail.next = e; loTail = e; } else { if (hiTail == null ) hiHead = e; else hiTail.next = e; hiTail = e; } } while ((e = next) != null ); if (loTail != null ) { loTail.next = null ; newTab[j] = loHead; } if (hiTail != null ) { hiTail.next = null ; newTab[j + oldCap] = hiHead; } } } } } return newTab; }
1 2 3 4 static final int hash (Object key) int h; return (key == null ) ? 0 : (h = key.hashCode()) ^ (h >>> 16 ); }
因为引入了红黑树,所以在hash这块进行了简化。
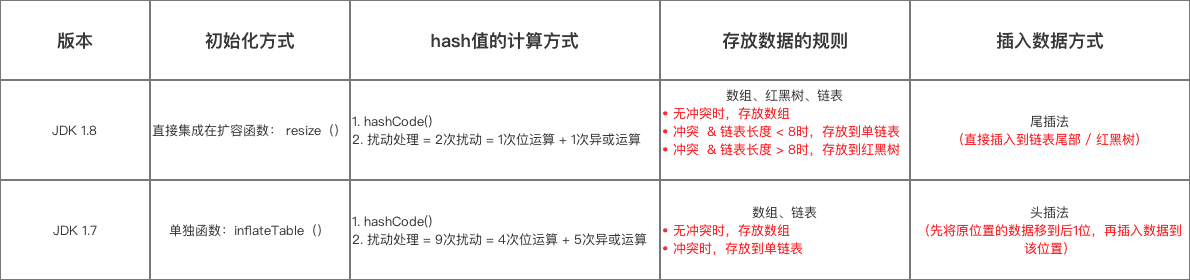
HashMap 的实现在 JDK 1.7 和 JDK 1.8 差别较大,具体区别如下
JDK 1.8 的优化目的主要是:减少 Hash冲突 & 提高哈希表的存、取效率
红黑树既保证了插入效率,也保证了查询效率。
因为HashMap使用位运算来代替了取模运算 (一个量级的差别),元素能够计算在0-15的范围内,必须要求数组长度为2的指数次幂。否则,有可能出现数组越界,以及大量的hash碰撞 。
因为数组扩容,需要rehash,一旦数据量大,也就意味着性能瓶颈。所以采用位运算,也就对数组长度有要求。
如果定为1,可能存在单个节点链表特别长,查询效率低。同时,hash碰撞会增多。
如果定为0.5,那么空间浪费太大了。
而0.75,是取的空间利用率和时间复杂度的均值来的,计算方法是利用牛顿二项式,结果为log2,取近似值0.75。